hinf-lqgbt-nse
Python module for application of (Hinf-)LQG-balanced truncation for low-order controllers for the stabilization of Navier-Stokes equations.
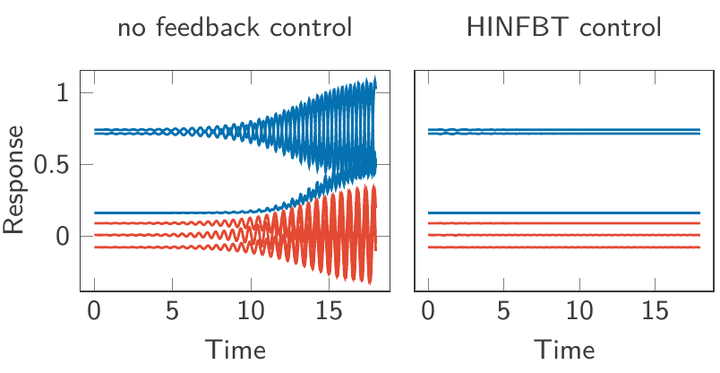
As an example we consider the stabilization of the cylinder wake at moderate Reynoldsnumbers via boundary control and distributed observation.
Features
- implementation of various Riccati-based feedback controllers
- static state feedback
- observer based LQGBT feedback
- robustified LQGBT feedback
- integration with M.E.S.S or my homebrew Riccati solver for flow related equations